

















































Holybro Pixhawk 6X with Jetson Baseboard
389.00 $ – 1420.00 $

Description
Holybro Pixhawk 6X with Jetson Baseboard Overview
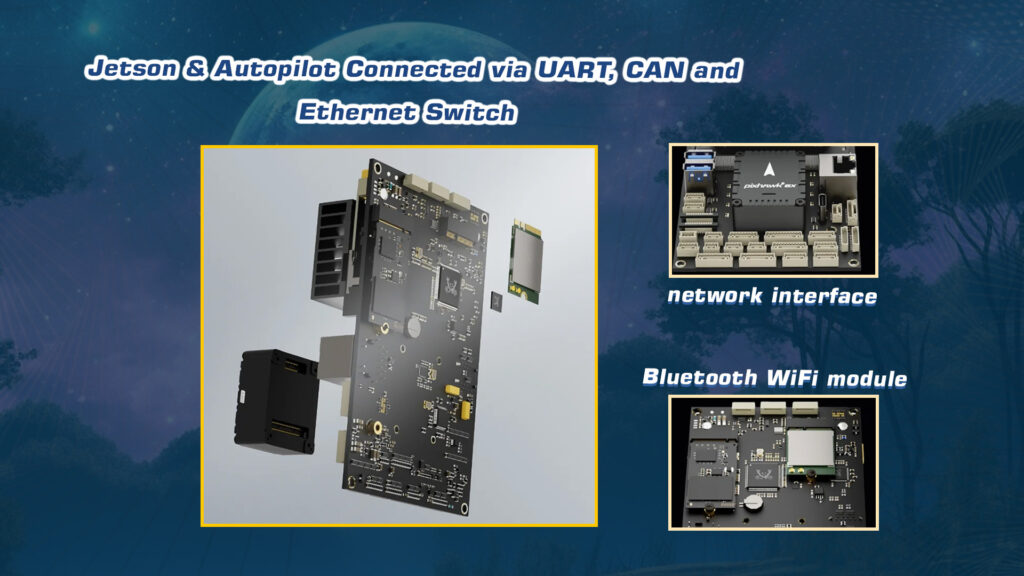
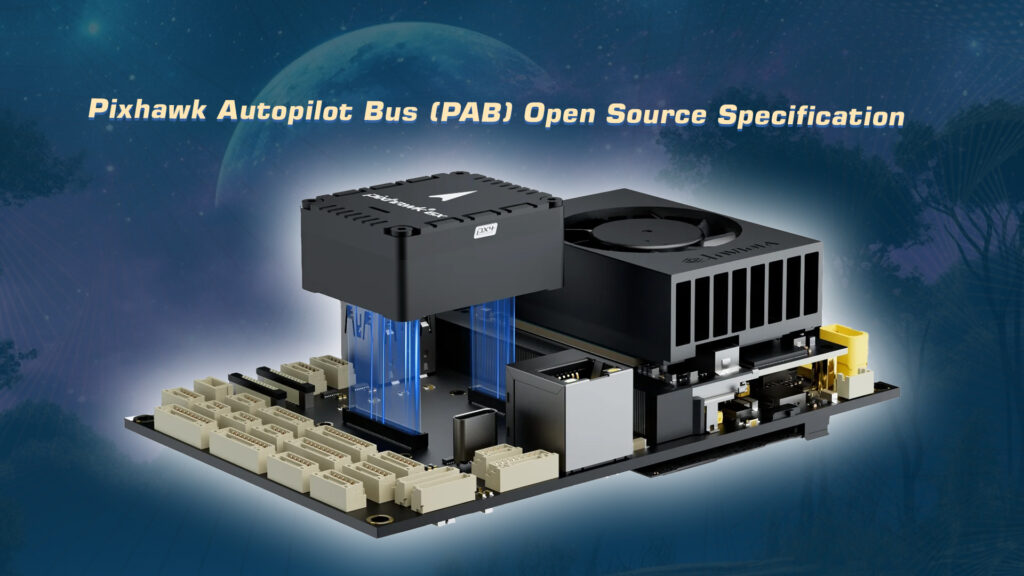
The Holybro Pixhawk 6X with Jetson Baseboard is based on the Pixhawk Autopilot Bus open source specification and the NVIDIA Jetson Orin NX/Nano Carrier Board. The Pixhawk Autopilot Bus (PAB) Form Factor enables this to be used with any PAB drone flight controller such as the Pixhawk 6X.
Port & Connection
Jetson Connectors
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-pin JST-GH
- RJ45
- 2x MIPI CSI Camera Inputs
- 4 Lanes each
- 15-Pin Raspberry Pi Cam FFC
- 2x USB 3.0 Host Port
- USB A
- 5A Current Limit
- 2x USB 2.0 Host Port
- 5-Pin JST-GH
- 0A Current Limit
- USB 2.0 for Programming/debugging
- USB-C
- 2 Key M 2242 for NVMe SSD
- PCIEx4
- 2 Key E 2230 for WiFi/BT
- PCIEx2
- USB
- UART
- I2S
- Mini HDMI Out
- 4x GPIO
- 6-pin JST-GH
- CAN Port
- Connected to Autopilot’s CAN2 (4 Pin JST-GH)
- SPI Port
- 7-Pin JST-GH
- I2C Port
- 4-Pin JST-GH
- I2S Port
- 7-Pin JST-GH
- 2x UART Port
- 1 for debug
- 1 connected to Autopilot’s telem2
- Fan Power Port
- IIM42652 IMU
- Input Power
- XT30 Connector
- Voltage Rating: 7V-24V (3S-4S)
- Separate input power circuits than the Autopilot to ensure flight safety
- Holybro UBEC can be used for application above 4S
- Note: The Pixhawk Jetson Baseboard has an integrated UBEC to convert 7V-24V to 5.5V for the Jetson. Using an external UBEC alongside the integrated one provides redundancy and easier replacement in case of BEC failure.
- Power Requirements
- 8V/3A Minimum
- Depends on Usage and Peripherals
Autopilot Connectors
- Pixhawk Autopilot Bus Interface
- 100 Pin Hirose DF40
- 50 Pin Hirose DF40
- Redundant Digital Power Module Inputs
- I2C Power Monitor Support
- 2x – 6 Pin Molex CLIK-Mate
- Power Path Selector w/ Overvoltage Protection
- Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Full GPS Plus Safety Switch Port
- 10-Pin JST-GH
- Secondary (GPS2) Port
- 6-pin JST-GH
- 2x CAN Ports
- 4 Pin JST-GH
- 3x Telemetry Ports with Flow Control
- 2x 6-Pin JST-GH
- 1 is connected to Jetson’s UART1 Port
- 16 PWM Outputs
- 2x 10-Pin JST-GH
- UART4 & I2C Port
- 6-Pin JST-GH
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-pin JST-GH
- RJ45
- AD & IO
- 8-Pin JST-GH
- USB 2.0
- USB-C
- 4-pin JST-GH
- DSM Input
- 3-pin JST-ZH 1.5mm Pitch
- RC in
- PPM/SBUS
- 5-pin JST-GH
- SPI Port
- External Sensor Bus (SPI5
- 11-Pin JST-GH
- 2x Debug Port
- 1 for FMU
- 1 for IO
- 10-Pin JST-SH
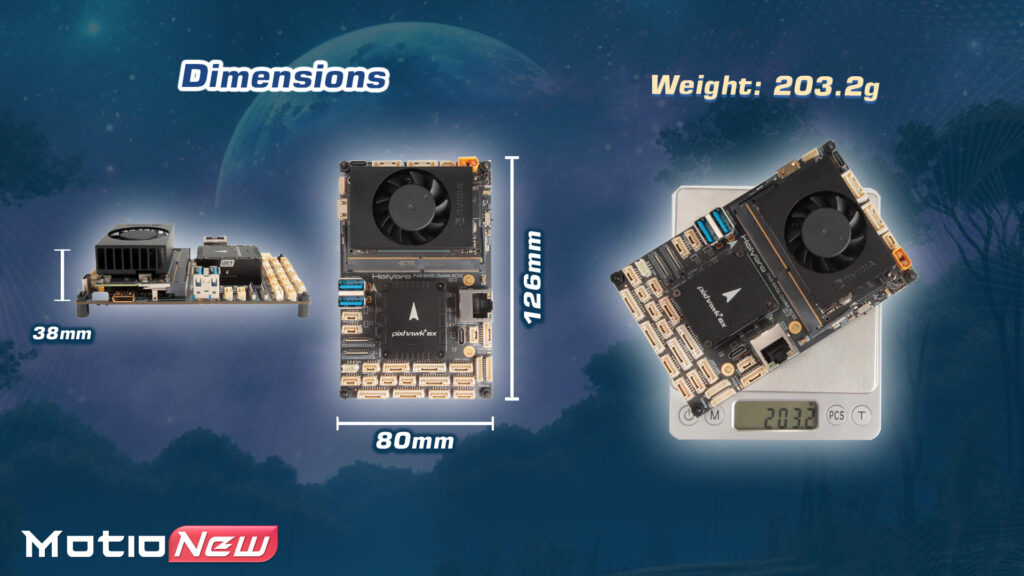
- Dimensions (Without Jetson and Flight Controller Module)
- 126x80x38mm
- Weight
- With Jetson, Heatsink, Flight Controller, M.2 SSD, M.2 Wi-Fi Module 203.2g
UBEC Specifications
- Input voltage: 3~14S (XT30)
- Output voltage: 6.0V/7.2V/8.0V/9.2V (recommend 7.2V if supplying power to Jetson Board)
- Output Current
- Continuous: 12A
- Burst: 24A
- Size: 48×33.6×16.3 mm
- Weight: 47.8g





If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
Specifications
| FMU Processor of pixhawk6x | STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM |
| IO Processor |
IO Processor: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM |
| On-board sensors | |
| Accel/Gyro | 3x ICM-45686 (with BalancedGyro™ Technology) |
| Magnetometer | BMM150 |
| Barometer |
ICP20100 & BMP388 |
| Max input voltage Ratings | 6V |
| USB Power Input Ratings | 4.75~5.25V |
| Servo Rail Input Ratings | 0~36V |
| Telem1 output current limiter | 1.5A |
| All other port combined output current limiter | 1.5A |
| Flight Controller Module | 38.8 x 31.8 x 16.8mm |
| Standard Baseboard | 52.4 x 102 x 16.7mm (Aluminum) |
| Mini Baseboard | 43.4 x 72.8 x 14.2 mm |
| Flight Controller Module Weight | 31.3g |
| Standard Baseboard Weight | 72.5g (Aluminum) |
| Mini Baseboard Weight | 26.5g |
Product contents
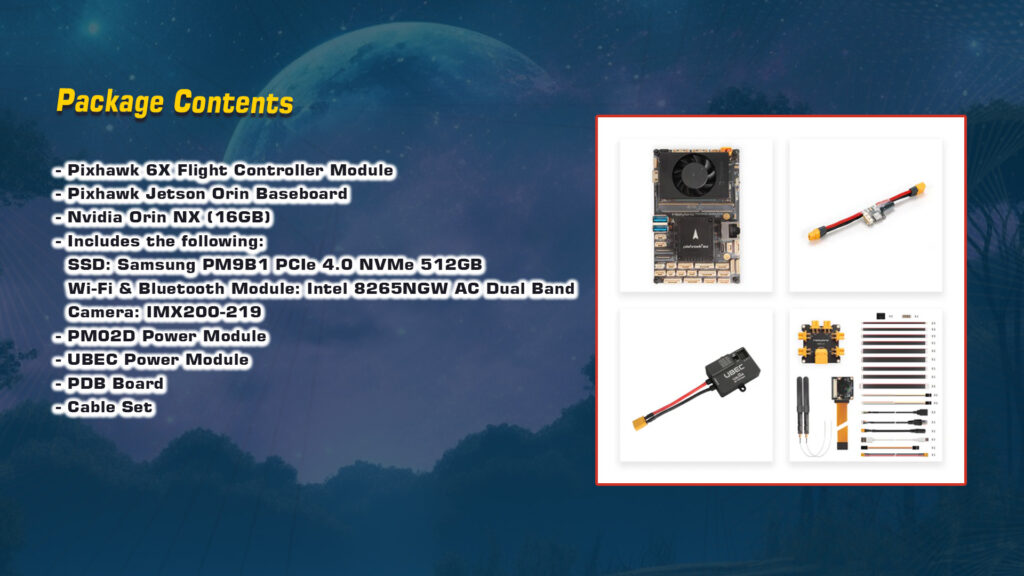
with 6X autopilot:
- Pixhawk 6X Flight Controller Module
- Pixhawk Jetson Orin Baseboard
- Nvidia Orin NX (16GB)
- Includes the following:
- SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
- Wi-Fi & Bluetooth Module: Intel 8265NGW AC Dual Band
- Camera: IMX219-200
- PM02D Power Module
- UBEC Power Module
- PDB Board
- Cable Set
Baseboard only:
- Pixhawk Jetson Orin Baseboard
- Cable Set
Documents
- Holybro Pixhawk Jetson Baseboard Full Pinout
- Holybro Pixhawk Jetson Baseboard Dimension & Weight
- Holybro Pixhawk Jetson Baseboard Flashing Guide
- Holybro Pixhawk Jetson Baseboard CAN Setup
- Holybro Pixhawk Jetson Baseboard CSI Camera Setup
- Holybro Pixhawk Jetson Baseboard MAVLINK Bridge
- Holybro Pixhawk Jetson Baseboard Other Reference Link
This is a GUI-based solution by Nvidia which can be found from the link below:
https://docs.nvidia.com/sdk-manager/install-with-sdkm-jetson/index.html
Note: Keep it in mind that at the time of writing this document we chose to install Jetpack 5.3.1
Related products
-

-
NEW Holybro Pixhawk 6C UAV Flight Controller
- 139.00 $ – 231.00 $
-
-
-
Sale!
CUAV Airspeed Sensor MS4525 with Pitot Tube
- Original price was: 75.00 $.69.00 $Current price is: 69.00 $.
-
Sale!
-
-
CUAV NEO 3 Pro GNSS UAV Module
- 155.00 $
-
-
-
CUAV CAN Power Distribution Board (PDB)
- 155.00 $ – 900.00 $
-
-
-
NEW Holybro Pixhawk 6X UAV Flight Controller ICM-45686
- 124.00 $ – 320.00 $
-









1 review for Holybro Pixhawk 6X with Jetson Baseboard