


























































Holybro Pixhawk RPi CM4 UAV Flight Controller Baseboard
250.00 $ – 382.00 $

Description
Holybro Pixhawk RPi CM4 UAV Flight Controller Baesboard
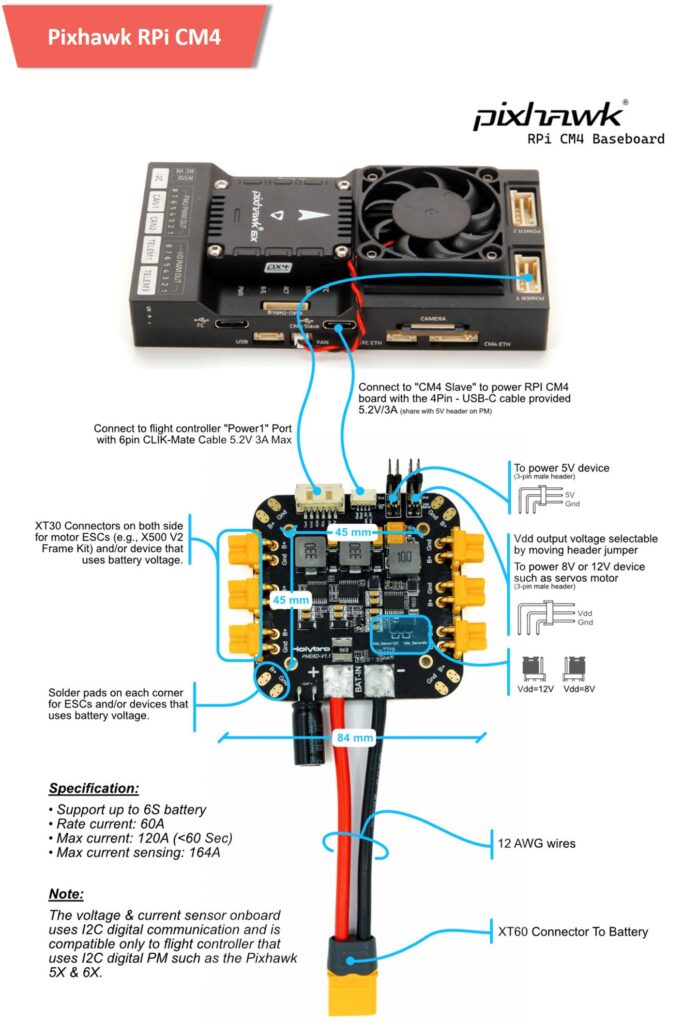
The Holybro Pixhawk RPi CM4 Baseboard makes the connection between Pixhawk drone flight controllers and Raspberry Pi Compute Module 4 (RPi CM4) as a companion computer, an easy job. It creates a compact form with all the connections that one may need for development. All Pixhawk connectors and autopilot bus standard is followed for compatibility, which allows using any compatible Pixhawk Flight Controller.
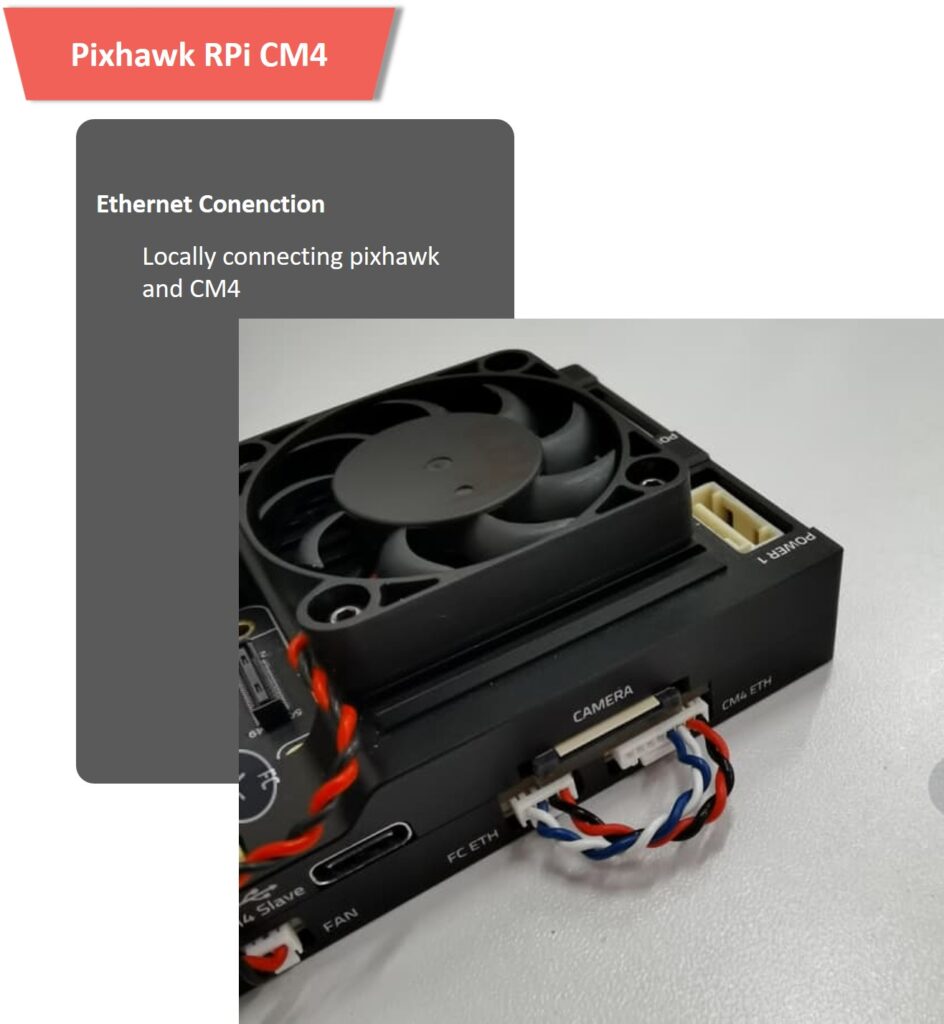
The Drone Autopilot Flight Controller module is internally connected to the RPi CM4 through TELEM2, while there is the possibility of an ethernet connection using an external cable. Pixhawk 5X and Pixhawk 6X flight controllers are compatible with this baseboard.
Holybro’s Pixhawk 6X UAV Flight Controller is an autopilot device based on FMUv6 that is ideal for use by engineers at startups, corporate research labs, and academics (research, professors, students) as well as for commercial applications. The FMUv6X open-hardware standard includes high-performance and low-noise IMUs on board that helps improve stabilization.
Pixhawk 6X was one of the first Pixhawk boards to add support for fast Ethernet connection. With Microchip Ethernet PHY integrated into the External Sensor Bus (SPI5), high-speed communication with mission computers such as BeagleBone Black and Raspberry Pi 4 via Ethernet was made possible, as well as two chip select lines and data-ready signals for additional sensors and payload. Pixhawk 6X Autopilot firmware could handle more complex algorithms and models, thanks to the increased processing power and RAM in this flight controller.
If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
Specifications
| Pixhawk 6X FC Module Specifications | |
| FMU Processor of pixhawk6x | STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM |
| IO Processor | STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM |
| On-board sensors
Accel/Gyro: |
ICM-20649 |
| Accel/Gyro: | ICM-42688-P |
| Accel/Gyro: | ICM-42670-P |
| Mag: | BMM150 |
| Barometer: | 2x BMP388 |
| Max input voltage Ratings | 6V |
| USB Power Input Ratings: | 4.75~5.25V |
| Servo Rail Input Ratings: | 0~36V |
| Telem1 output current limiter: | 1.5A |
| All other port combined output current limiter: | 1.5A |
| Flight Controller Module | 38.8 x 31.8 x 14.6mm |
| Standard Baseboard: | 52.4 x 103.4 x 16.7mm |
| Mini Baseboard: | 43.4 x 72.8 x 14.2 mm |
| Flight Controller Module Weight | 23g |
| Standard Baseboard Weight | 51g |
| Mini Baseboard Weight | 26.5g |
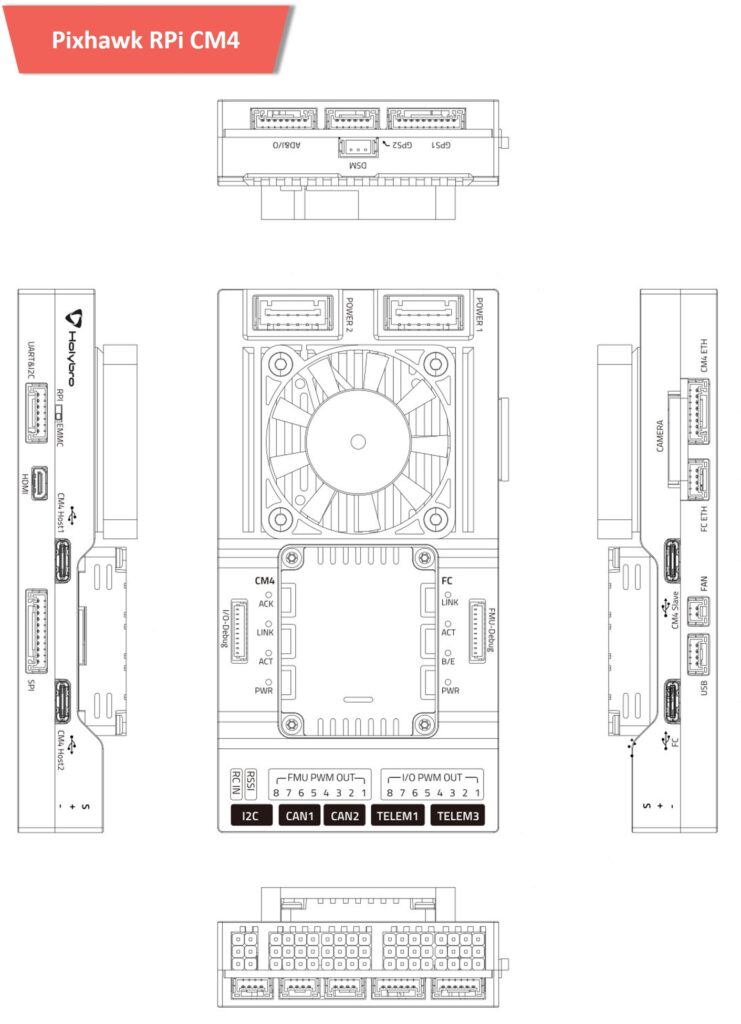
| 16x PWM servo outputs | |
| R/C input for Spektrum / DSM | |
| Dedicated analog / PWM RSSI input and S.Bus output | |
| 4x general-purpose serial ports | 3 with full flow control
1 with separate 1.5A current limit (Telem1) 1 with I2C and additional GPIO line for external NFC reader |
| 2x GPS ports | 1 full GPS plus Safety Switch Port
1 basic GPS port |
| 1x I2C port | |
| 1x Ethernet port | |
| Transformerless Applications | |
| 100Mbps | |
| 1x SPI bus | 2 chip select lines
2 data-ready lines 1 SPI SYNC line 1 SPI reset line |
| 2x CAN Buses for CAN peripheral | CAN Bus has individual silent controls or ESC RX-MUX control |
| 2x Power input ports with SMBus | 1 AD & IO port
2 additional analog input 1 PWM/Capture input 2 Dedicated debug and GPIO lines |
Product contents
Bundle 1
- Pixhawk RPi CM4 Baseboard
- Note: Does not include Flight Controller Module & RPi CM4
- PM03D Power Module
- Pixhawk RPi CM4 Baseboard Cable Set

Bundle 2
- Pixhawk 6X Flight Controller Module
- PM03D Power Module
- Pixhawk RPi CM4 Baseboard
- Note: Does not include RPi CM4
- Pixhawk RPi CM4 Baseboard Cable Set

Bundle 3
- Raspberry Pi CM4
- RAM: 8GB
- eMMC: 32GB
- Wireless: No

Documents
Related products
-

-
Sale!
CUAV Airspeed Sensor MS4525 with Pitot Tube
- Original price was: 75.00 $.69.00 $Current price is: 69.00 $.
-
Sale!
-
-
Sale!
Pixhawk CUAV V5 Nano Autopilot Drone
- 169.00 $ – 998.00 $
-
Sale!
-
-
CUAV CAN Power Distribution Board (PDB)
- 155.00 $ – 900.00 $
-
-
-
CUAV Pixhawk V5+ UAV Flight Controller
- 335.00 $ – 1170.00 $
-









1 review for Holybro Pixhawk RPi CM4 UAV Flight Controller Baseboard