



































































MUF-P7C Flight Controller with Integrated Dual Antenna RTK GPS
2999.00 $

Description
MUF-P7C Flight Controller with Integrated Dual Antenna RTK GPS
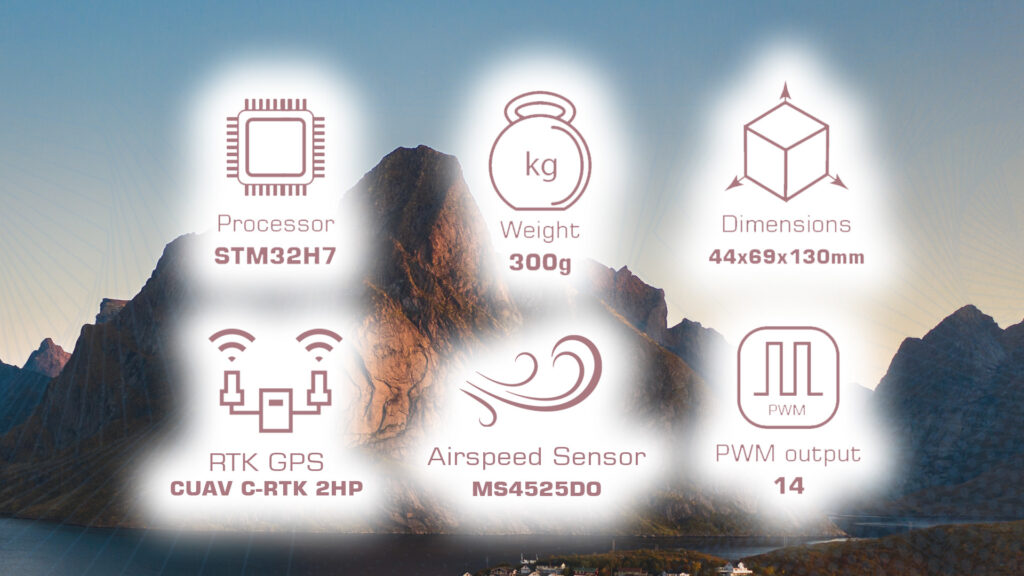
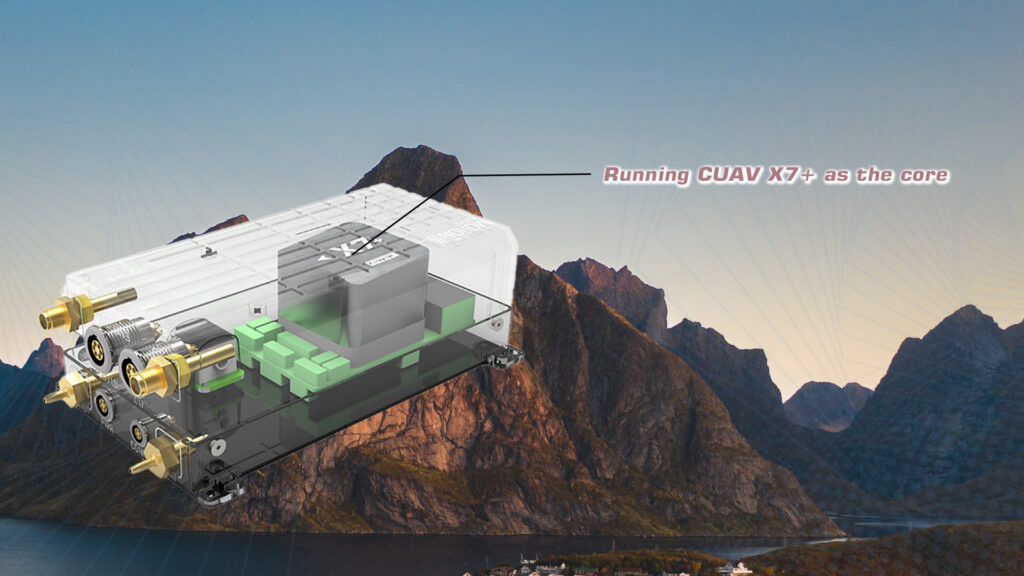
The MUF-P7C Flight Controller is an advanced drone autopilot system designed for unmanned aerial vehicles (UAVs). It integrates seamlessly into UAV systems, providing precise and reliable control for autonomous flight. At its core, the MUF-P7C is powered by the CUAV Pixhawk X7+ and utilizes the STM32H7 processor.
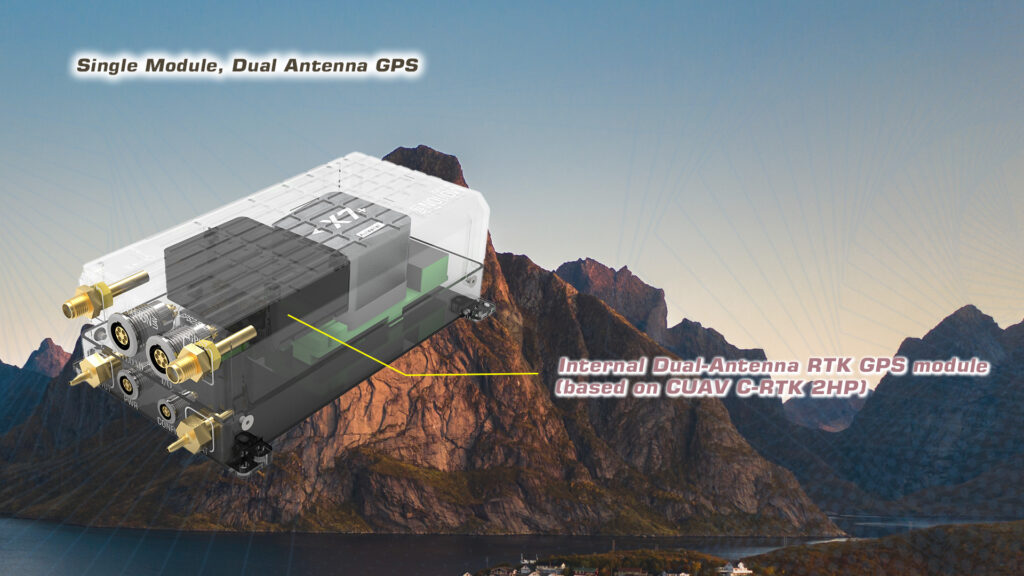
Equipped with integrated dual-antenna RTK GPS, CUAV C-RTK 2HP, and an airspeed sensor based on the MS4525DO, the MUF-P7C ensures accurate positioning and velocity information during flight. The RTK GPS module, CUAV C-RTK 2HP, enhances the system’s precision and reliability, contributing to optimal navigation in various environments.
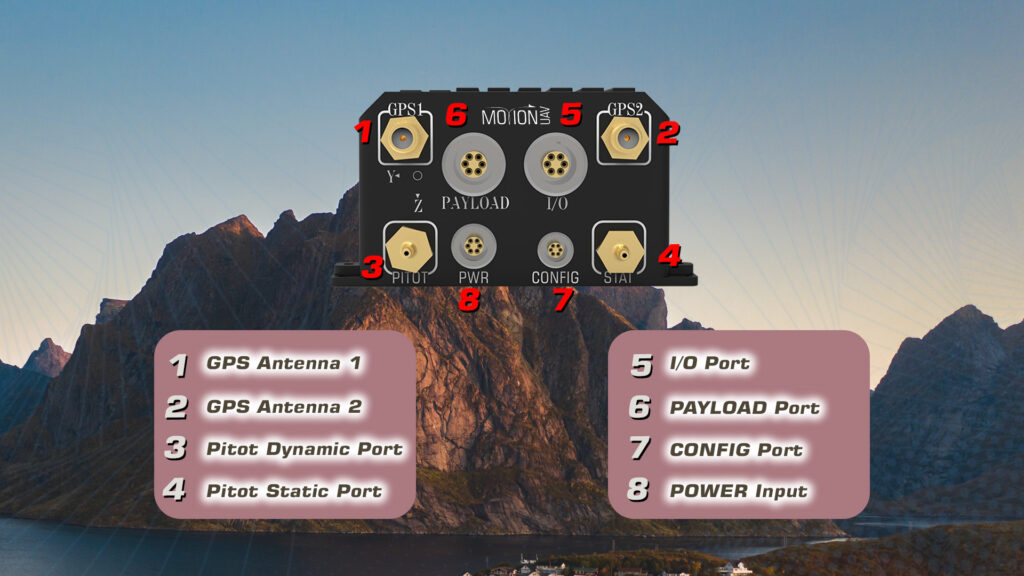
Encased in a robust aviation aluminum case with integrated industrial LEMO connectors, the MUF-P7C is built for durability and ease of interface. The connectors include two connectors for GPS antennas, dynamic and static ports for Pitot measurements, and versatile I/O ports such as UART, I2C, CAN, and dedicated ports for payload and configuration.
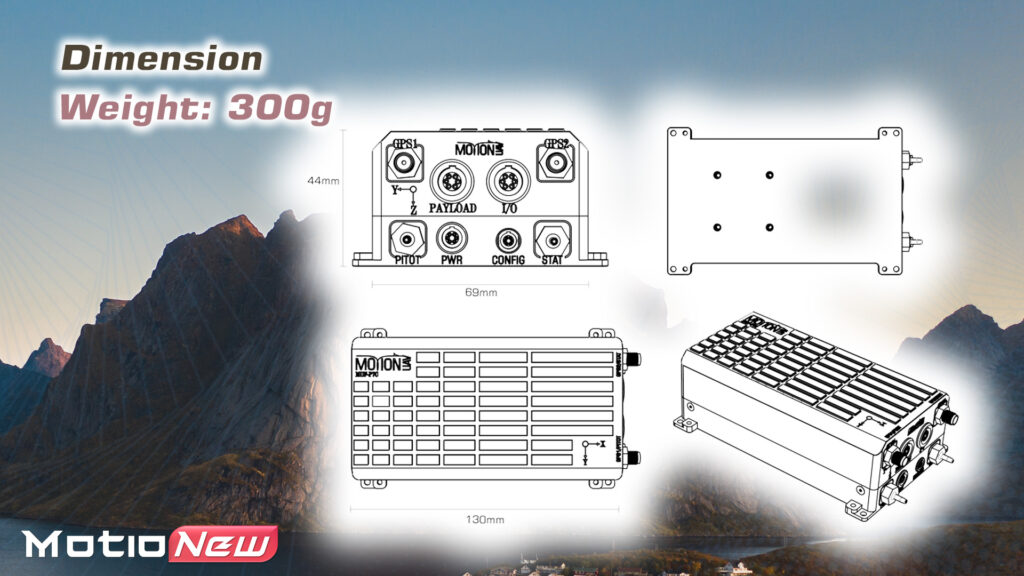
The compact dimensions of 44x69x130mm and a lightweight design of 300 grams make the MUF-P7C suitable for a wide range of UAV applications. Its flanged aluminum case further adds to the structural integrity of the system to be easily installed on different UAV platforms.
The MUF-P7C supports 14 PWM outputs, enabling precise control over various UAV actuators and accessories. With dedicated ports for power input, battery voltage and current sensing, the flight controller ensures efficient power management and monitoring.
Built in with three sets of IMU sensors, ICM42688P, ICM20689, and another ICM20689, the flight controller monitors the data of multiple sensors in real-time, and executes redundant switching immediately in case of failure to improve flight safety and stability. This combination of high-performance IMUs ensures optimal navigation and stability for your unmanned aerial vehicle (UAV). The ICM42688P, known for its exceptional accuracy and sensitivity, forms the first cornerstone of the sensor redundancy design. Paired with two ICM20689 units, this triple IMU configuration creates a robust foundation for real-time data monitoring. The flight controller continuously processes and cross-references information from these multiple accelerometers and gyroscopes, providing a comprehensive understanding of the UAV’s orientation and motion.
In summary, the Drone Flight Controller MUF-P7C is a comprehensive autopilot system with cutting-edge features, making it an ideal choice for UAVs that demand high-precision navigation and reliable autonomous flight capabilities.
If you have any questions regarding our products, use the Motionew Contact us page to consult our engineering team.





Specifications
| Specifications | |
| PWM output | 14 |
| Airspeed Sensor | MS4525DO |
| Weight | 300g |
| Dimensions | 44x69x130mm |
| Installation type | flanged |
| Interface |
|
| 4x lemo | Payload: PWM Output, RC Input I/O: UART, I2C, CAN PWR: Power Input, Battery Voltage and Current Sensing CONFIG: Cube X7+ USB Port for firmware and parameters upgrade |
| 2x antenna connectors | (GPS antenna connectors) |
| 2x Pitot tube | (Airspeed Dynamic and Static Ports) |
| X7+ CUAV Autopilot | |
| Main FMU Processor | STM32H743 |
| Frequency | 480MHz |
| Flash | 2MB |
| RAM | 1MB |
| On-board sensors | Accelerometer/Gyroscope: ICM-42688-P(X7: BMI088) Accelerometer/Gyroscope: ICM-20689 Accelerometer/Gyroscope: ICM-20689(X7: ICM-20649) Magnetometer: RM3100 Barometer: MS5611*2 |
| Firmware | Copter/ Plane/ Helicopter/ VTOL/ unmanned vehicle/ Rover, etc. |
| PX4 Firmware |
PX4 1.12.3 or above version Copter/Plane, other models are adapting |
| Power System | Power: 4.5~5.4V USB Input: 4.75~5.25V Servo Rail Input: 0~10V |
| Operating temperature | -20 ~ 85°c |
Documents
Please contact us for more information.
Product contents
1 set of MUF-P7C with cable set
Related products
-

-
Pixhawk 1 Radiolink UAV Flight Controller
- 139.00 $ – 178.00 $
-
-
-
Sale!
Pixhawk CUAV V5 Nano Autopilot Drone
- 169.00 $ – 998.00 $
-
Sale!
-
-
Pixhawk CUAV X7+ Pro
- 879.00 $ – 1695.00 $
-








1 review for MUF-P7C Flight Controller with Integrated Dual Antenna RTK GPS