
























































Pixhawk 4 Holybro UAV Flight Controller
179.97 $ – 257.95 $

Description
Pixhawk 4 Holybro UAV Flight Controller
Pixhawk 4® Holybro UAV autopilot is a Drone Flight Controller advanced designed and made in collaboration with Holybro® and the PX4 team. It is optimized to run PX4 version 1.7, suitable for academic and commercial developers.
It is based on the Pixhawk-project FMUv5 open hardware design and runs PX4 on the NuttX OS.
Features
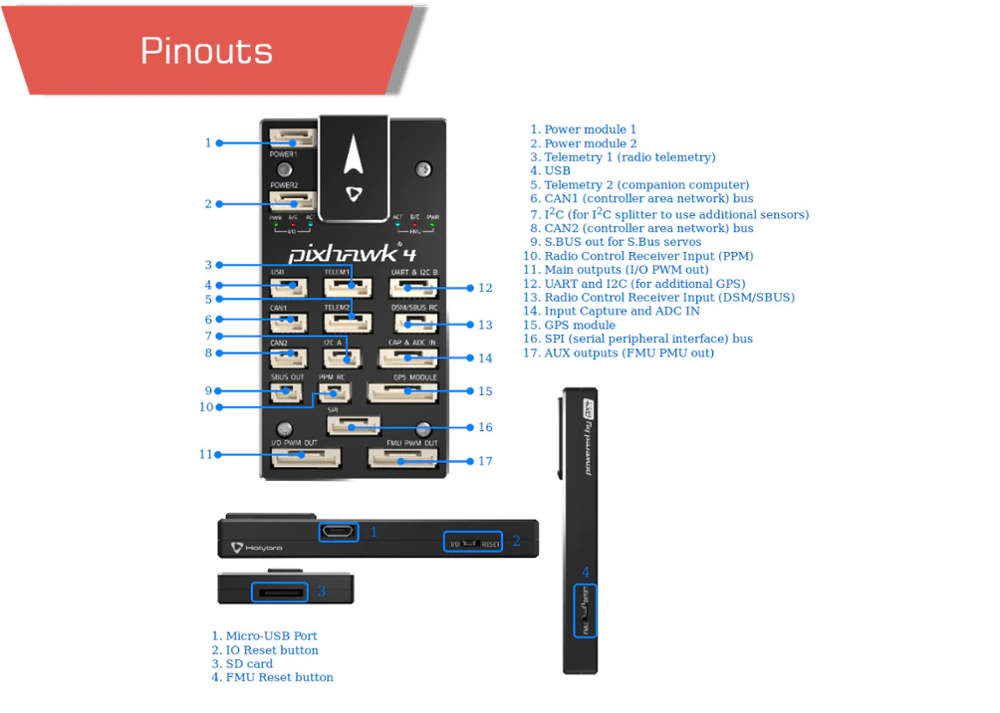
- 8-16 PWM outputs (8 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- Dedicated S.Bus servo output
- 5 general purpose serial ports
- 3 I2C ports
- 4 SPI buses
- Up to 2 CAN Buses for dual CAN with serial ESC
- Analog inputs for voltage / current of 2 batteries

If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
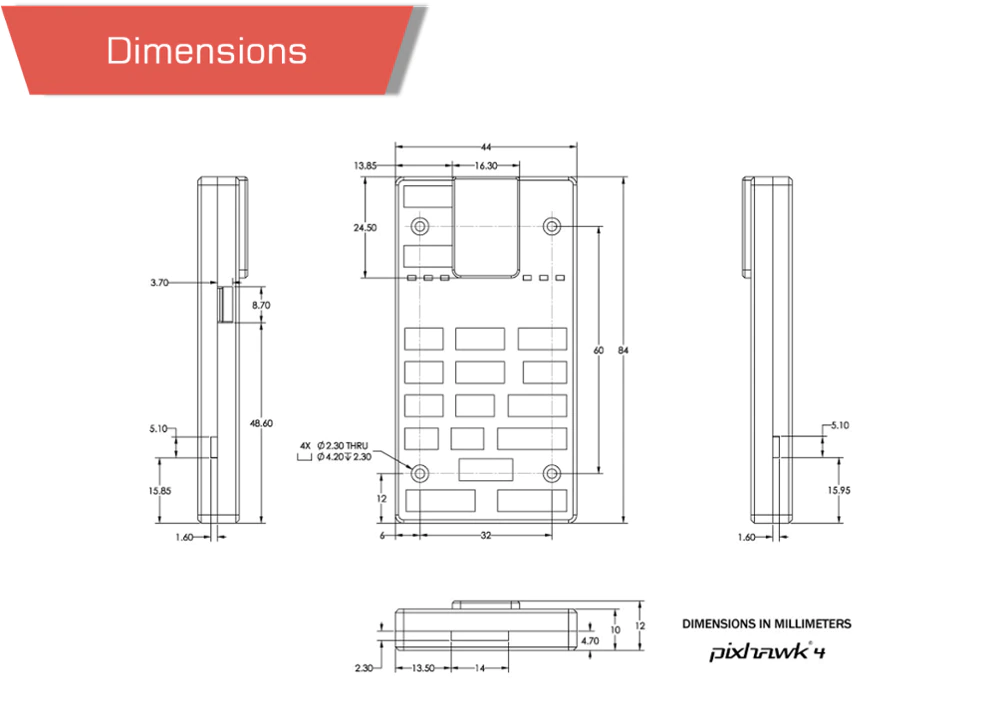
Specifications
| Weight | 33.3g | |
| Dimension | 44x84x12mm | |
| Operating temperature | -40 ~ 85°c | |
| Case Material | Plastic | |
| Main FMU Processor | STM32F765
32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM |
|
| IO Processor | STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM |
|
| On-board sensors | Accel/Gyro: ICM-20689 Accel/Gyro: BMI055 |
|
| Magnetometer | IST8310 | |
| Barometer | MS5611 | |
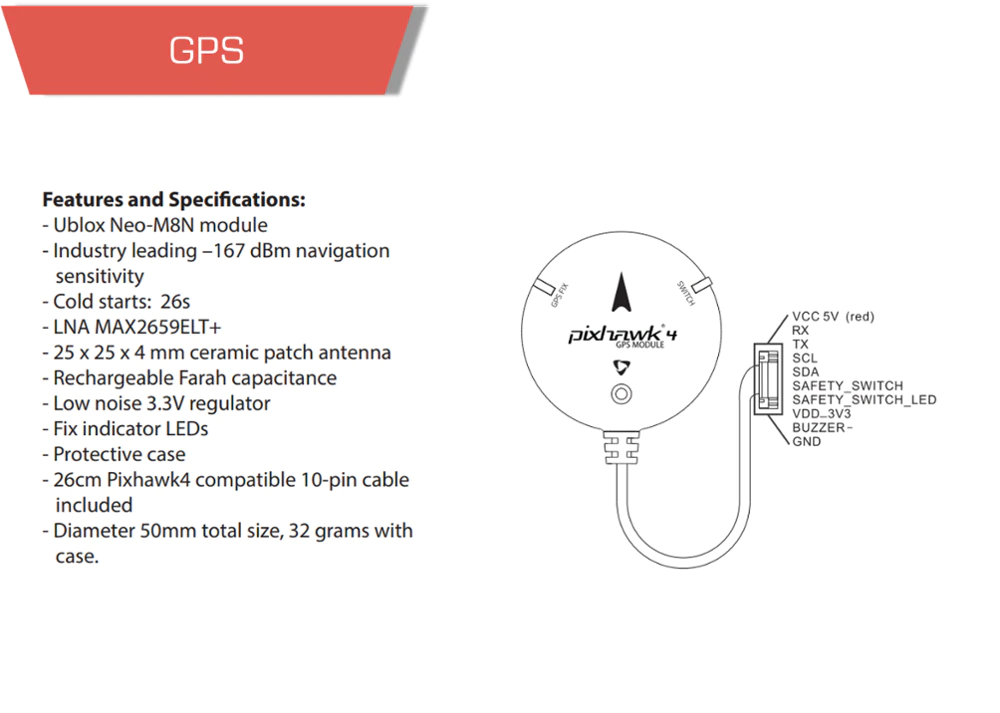
| GPS | ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310 | |
| Power module output | 4.9~5.5V | |
| USB Power Input | 4.75~5.25V | |
| Servo Rail Input | 0~36V | |
Product contents
Product contents
Documents
Related products
-

-
CUAV Pixhawk V5+ UAV Flight Controller
- 335.00 $ – 1170.00 $
-
-
-
Pixhawk CUAV V5+ and X7 and X7pro Flight Controller
- 249.00 $ – 802.00 $
-
-
-
CUAV NEO 3 Pro GNSS UAV Module
- 155.00 $
-
-
-
Pixhawk 1 Radiolink UAV Flight Controller
- 139.00 $ – 178.00 $
-
-
-
NEW Holybro Pixhawk 6X UAV Flight Controller ICM-45686
- 124.00 $ – 320.00 $
-









1 review for Pixhawk 4 Holybro UAV Flight Controller